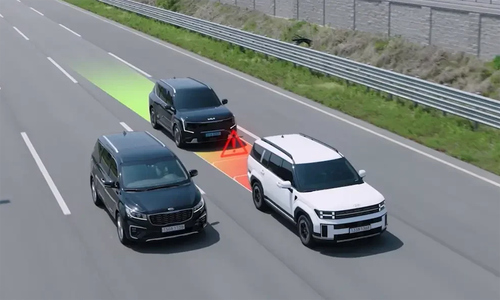
Công nghệ ngăn chặn ôtô bị đâm từ phía sau VnExpress Công nghệ mới sẽ cảnh báo tài xế và tự động duy trì khoảng cách an toàn với xe tiếp cận quá gần từ phía sau.